
 企业资料通过认证
企业资料通过认证
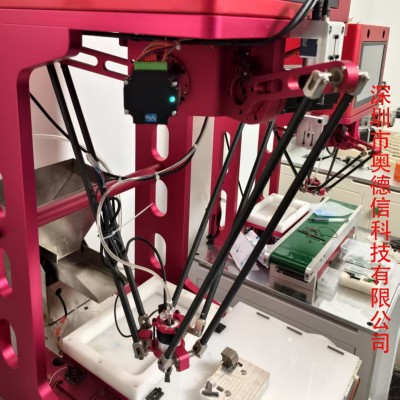



蜘蛛手机器人,智能高速分拣搬运,码垛分类,食品自动装箱,并联机械手。
蜘蛛手机器人核心特点是其并联结构:机器人通常由固定平台(base)和移动平台(end-effector)组成,两者通过多根平行臂(常见为3或4根)连接,每个臂由旋转关节驱动。这种设计实现了轻量化、低惯量和高动态响应,使其在高速运动时保持稳定。例如,在现代应用中,其重复定位精度可达±0.1mm,最大速度超过每秒10次拾取循环,远优于串联机器人。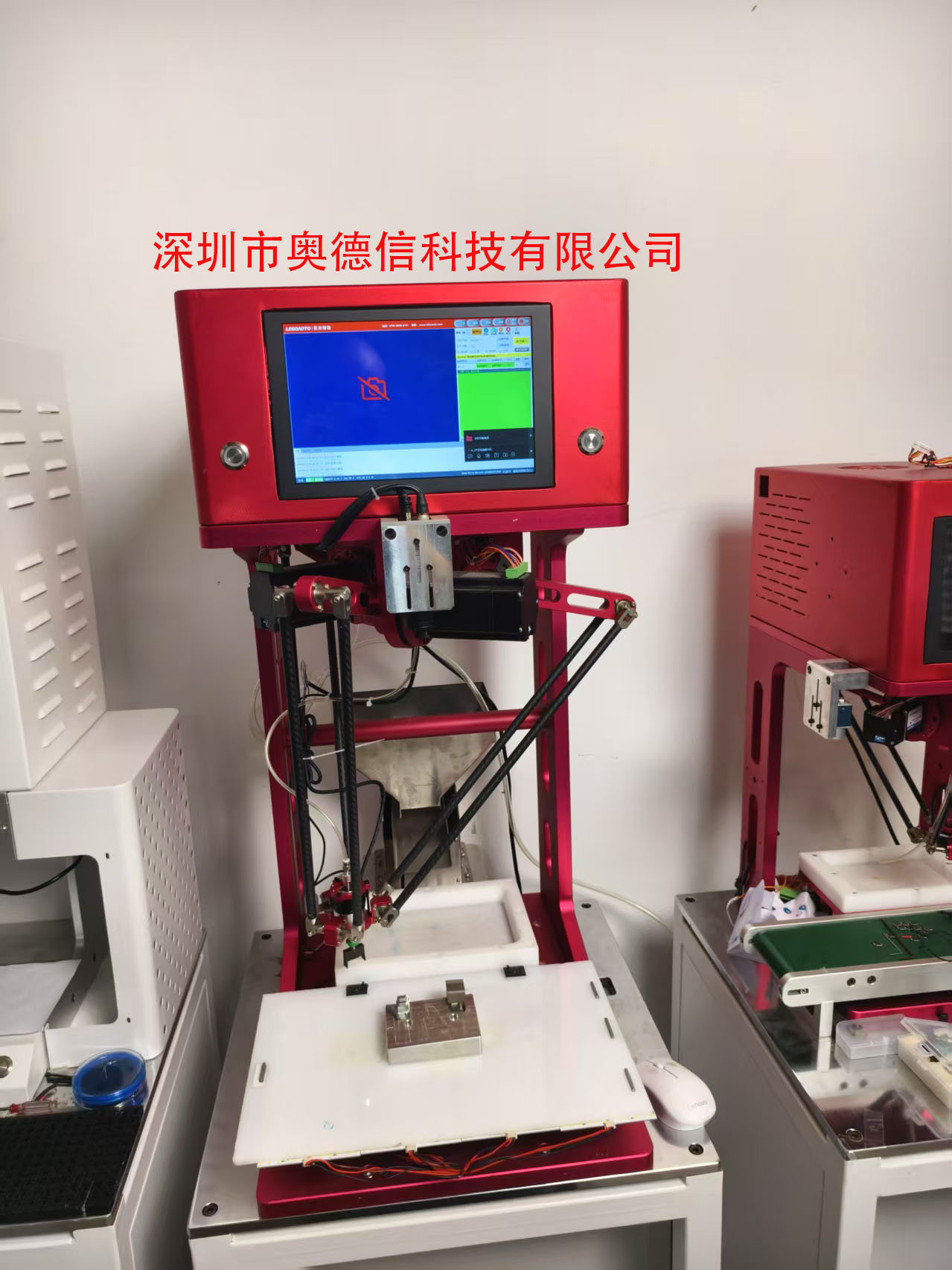





企业档案 产品分类 产品分类
站内搜索 友情链接
|
蜘蛛手机器人 并联机器人 柔性振动盘机器人 工业机器人
详细信息
蜘蛛手机器人,智能高速分拣搬运,码垛分类,食品自动装箱,并联机械手。 蜘蛛手机器人核心特点是其并联结构:机器人通常由固定平台(base)和移动平台(end-effector)组成,两者通过多根平行臂(常见为3或4根)连接,每个臂由旋转关节驱动。这种设计实现了轻量化、低惯量和高动态响应,使其在高速运动时保持稳定。例如,在现代应用中,其重复定位精度可达±0.1mm,最大速度超过每秒10次拾取循环,远优于串联机器人。 |